无人驾驶飞机简称“无人机”,英文缩写为“UAV”,主要是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。

无人机最早是在20世纪20年代出现的,1914年第一次世界大战中有人研制一种不用人驾驶,而用无线电操纵的小型飞机。现代战争是推动无人机发展的基本动力。世界第一架无人机诞生于1917年,而无人机真正投入作战始于越南战争,主要用于战场侦察。
1982年以色列与叙利亚在贝卡谷战争中,以色列使用无人机进行侦察、干扰、诱敌,无人机的作用再次被重视和开发。
1991年初的海湾战争中无人机已成为 “必须有”的战场能力,六套先锋无人机系统参战。提供了高品质、近实时、全天时的侦察、监视、目标捕获、拦截和战损评估。

1995年第一次俄罗斯车臣反恐战争和1999年第二次俄罗斯车臣反恐战争中,俄军使用了无人侦察机对战区进行侦察和监视,尤其在第二次车臣战争中,俄军的“蜜蜂”无人侦察机侦察了大量叛军资料,为俄军精确打击提供准确资料。
前述战争中,无人机担当的主要是侦察的角色,在阿富汗战争中,美国用“捕食者”作为载机,发射了“AGM-114C”“海尔法”空地导弹,首次在实战中实现了无人机发射导弹直接对地定点攻击,进一步发展了作战无人机的功能,也是对无人作战飞机的实战使用进行了验证,真正开始了无人化战争的起步。

军用无人机又分为信息支援、信息对抗、火力打击三大类;而民用无人机包括检测巡视类无人机、通信中继类无人机、遥感绘制类无人机和时敏目标打击类无人机。本文重点讨论民用无人机系统。
一个高性能FPGA芯片就可以在无人机上实现双CPU的功能,以满足导航传感器的信息融合,实现无人飞行器的最优控制。
伴随着应用加速计、陀螺仪、地磁传感器等设备广泛应用,MEMS惯性传感器开始大规模兴起,6轴、9轴的惯性传感器也逐渐取代了单个传感器,成本和功耗也进一步降低。
wifi等通信芯片用于控制和传输图像信息,通信传输速度和质量已经可以充分满足几百米的传输需求。
电池能量密度不断增加,使得无人机在保持较轻的重量下,续航时间能有25-30分钟,达到可以满足一些基本应用的程度,此外,太阳能电池技术使得高海拔无人机可持续飞行一周甚至更长时间。


飞控系统是无人机的“驾驶员”,是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统。
飞控一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。其中,机身大量装配的各种传感器(包括角速率、姿态、位置、加速度、高度和空速等)是飞控系统的基础,是保证飞机控制精度的关键。未来要求无人机传感器具有更高的探测精度、更高的分辨率,因此高端无人机传感器中大量应用了超光谱成像、合成孔径雷达、超高频穿透等新技术。
现有飞控系统是开源与闭源系统的结合。国内优秀的无人机厂商,为了提高系统的专业化,则大部分在开源系统的基础上演化出自己的闭源系统。相比开源系统,无人机厂商自身的闭源系统加入了许多优化算法、简化了调参与线束,变得更加简单易用。
导航系统向无人机提供参考坐标系的位置、速度、飞行姿态,引导无人机按照指定航线飞行,相当于有人机系统中的领航员。
目前无人机所采用的导航技术主要有惯性导航、定位卫星导航、地形辅助导航、地磁导航、多普勒导航等。
无人机载导航系统主要分非自主(GPS等)和自主(惯性制导)两种,但分别有易受干扰和误差积累增大的缺点,而未来无人机的发展要求障碍回避、物资或武器投放、自动进场着陆等功能,需要高精度、高可靠性、高抗干扰性能,因此多种导航技术结合的“惯性 + 多传感器 +GPS+ 光电导航系统”将是未来发展的方向。
不同用途的无人机对动力装置要求也不同。低速、中低空小型无人机倾向于活塞发动机,低速短距、垂直起降无人机倾向涡轴发动机,小型民用无人机则主要采用电动机、内燃机或喷气发动机。
专业级无人机目前广泛采用的动力装置为活塞式发动机,但活塞式只适用于低速低空小型无人机。随着涡轮发动机推重比、寿命不断提高、油耗降低,涡轮将取代活塞成为无人机的主力动力机型。
现代数据链技术的发展推动者无人机数据链向着高速、宽带、保密、抗干扰的方向发展。随着机载传感器、定位的精细程度和执行任务的复杂程度不断上升,对数据链的带宽提出了很强的要求,未来随着机载高速处理器的突飞猛进,预计几年后现有射频数据链的传输速率将翻倍,未来可能还将出现激光通讯方式。
赋予无人机“智能”中关键技术之一是让无人机能够通过机器视觉感知周边的环境,并将结果转化为数据通过OS(操作系统)传给其他应用程序。
双目机器视觉基于三角定位原理,与人眼对三维世界的还原原理类似,通过比较两个同向摄像头拍摄的画面中同一物体的视角差来确定距离,从而从二维图像中还原出三维世界的立体模型。
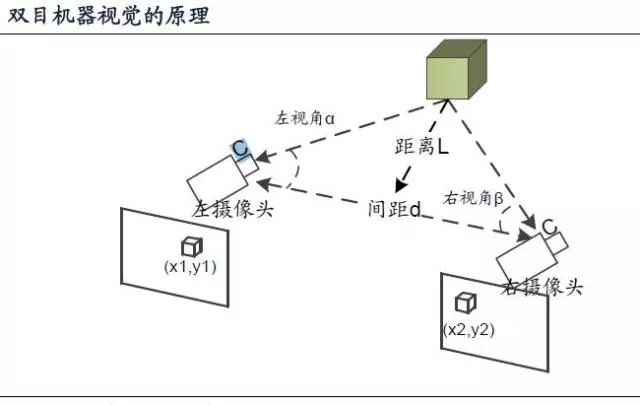
双目机器视觉的门槛不在于根据视角信息α、β和间距d解算距离L,而在于让计算机能够在画面中将物体从背景中“提取”出来。目前高通支持双目机器视觉的无人机参考设计使用旗舰芯片Snapdragon 801/820,可见其对计算能力的要求之高。
对人眼来说将一个物体从背景画面当中区分开来是一件很自然的事情,但对于计算机就不同了:同一景物在不同视点的摄像机图像平面上的成像会发生不同程度的扭曲和变形,要让计算机模糊分割出物体,图像分割算法需要做卷积/微分等大计算量运算;而无人机这种要求实时测距的场景下需要的总体计算性能就更高了。
为了规避计算机视觉中识别物体的大量计算以及提高精度,以Intel为代表的一批厂商使用了红外激光视觉技术,如Intel RealSense机器视觉模组。其基本原理见下图,其测距原理与双目视觉类似,但识别对象从物体替换成了打在物体表面的红外激光点。这样就从根本上消除了物体识别的计算需求。
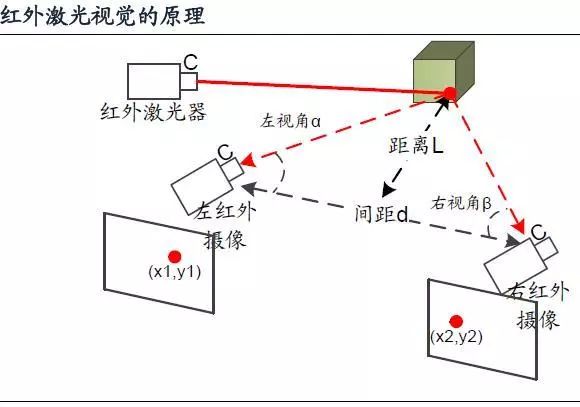
红外激光视觉的必要代价是将两个摄像头替换为红外摄像头,并增加一个红外激光扫描器的硬件成本以及功耗。其中红外激光扫描器由一个红外激光发射器和MEMS扫描反射镜组成,整体增加的硬件成本较高。
除了对计算量要求小以外,红外激光机器视觉还具有两大优点: 相比双目,其应用时间与范围更广,可在暗夜和照明条件不好的室内使用;相比双目,其有着更高的测距精度,能够精确还原物体的三维数据。
消费级无人机的核心应用就是基于无人机的航拍功能,而航拍功能对无人机系统要求最高的技术指标就是飞行的稳定性。
GPS可以测得无人机当前的水平位置和高度,飞控系统根据无人机位置和高度相对于悬停点的偏差对无人机进行补偿控制从而实现定点悬停。
然而,GPS信号更新较慢,而且GPS信号容易收到干扰,影响实际控制效果。因此工程实践中引入了飞行器的IMU信息与GPS信号进行滤波,得到更为精确和更新率更高的位置、高度信息,这种模式还可以保证在GPS失常时,仅依靠IMU提供应急位置高度信息,但是因为仅利用IMU信息进行位置高度解算时,解算结果容易发散,因此这种方法仅适合在空旷的户外进行悬停控制,而并不适宜在室内或有信号遮蔽的环境下使用。
测距传感器是一种较为成熟的测距传感器,能够根据发出与返回的时间差,测得传感器前的障碍物的距离,当无人机布置有下视传感器时,可测得较为精确的距地面距离,从而辅助实现定高控制,但是辅助定高对于水平位置的飘移控制起不到作用。

光流定位是采用图像传感器对传感器所捕捉的图像画面进行分析,间接解算得到自身位置、运动信息的一种技术。
随着图像处理算法的演进和图像处理硬件平台的发展,使得这种算法的精度和实时性得到保证,从而得以在无人机系统上得到应用。
光流定位是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。一般而言,光流是由于场景中前景目标本身的移动、相机的运动,或者两者的共同运动所产生的。
在无人机应用中,无人机机身加装对地的光流摄像头,根据所观测到的地面图像来进行定位的,其原理可通过下图进行理解:无人机在相对地面移动时,其对地观测镜头所拍摄到的画面会相对向反方向“移动”,根据无人机距离地面的高度(这也是光流传感器都与对地传感器成对出现的原因)以及对地观测图像中像素移动的量,即可推算出无人机相对地面移动的距离。
当无人机采用光流定位技术实现自身位置确定后,即可采用通用的控制算法实现水平面和高度上的定位。目前所采用的光流技术,基本上可以实现室内环境的稳定悬停,但是随着时间的累积,仍然会有十几厘米到几十厘米范围的飘移。不过,这种低频率、小幅度的位置改变对于航拍来说,是可以接受的。

对于航拍无人机来说,一个新的趋势是采用跟踪拍摄模式,即对无人机设置一个兴趣点,无人机则自动对兴趣点进行跟踪拍摄,这是无人机智能化的发展趋势。
GPS跟踪技术较为简单,即被跟踪者需手持遥控。
im电竞官网平台